
工业机器人实现柔性制造离不开的核心部件
2017-07-13 22:55:10·
微信公众号

机器人工具快换装置(Robotic Tool Changer)通过使机器人自动更换不同的末端执行器或外围设备,使机器人的应用更具柔性。这些末端执行器和外围设备包含例如点焊焊枪、抓手、真空工具、气动和电动马达等。工具快换装置包括一个机器人侧用来安装在机器人手臂上,还包括一个工具侧用来安装在末端执行器上。工具快换装置能够让
直接视觉引导与定位是一次性地对在机器人环境中物体的空间位姿进行详细描述,引导机器人直接地完成动作。与基于视觉伺服的方法相比,直接视觉引导的运算量大大减少,为实际应用创造了条件,但这必须基于一个前提:视觉系统能够在机器人空间中(基坐标系中)精确测定物体的三维位姿信息。

举报 0
收藏 0
分享 116
-
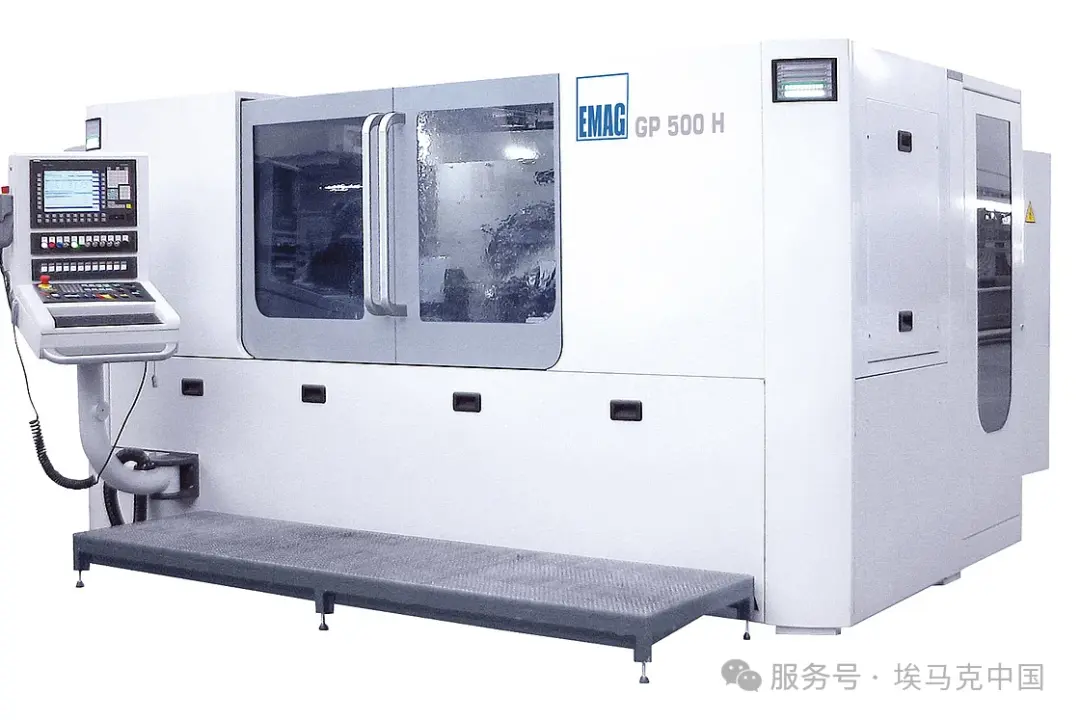
聚焦机床 | 高效成形磨削:埃马克GP 500 H实现
2025-10-30 -
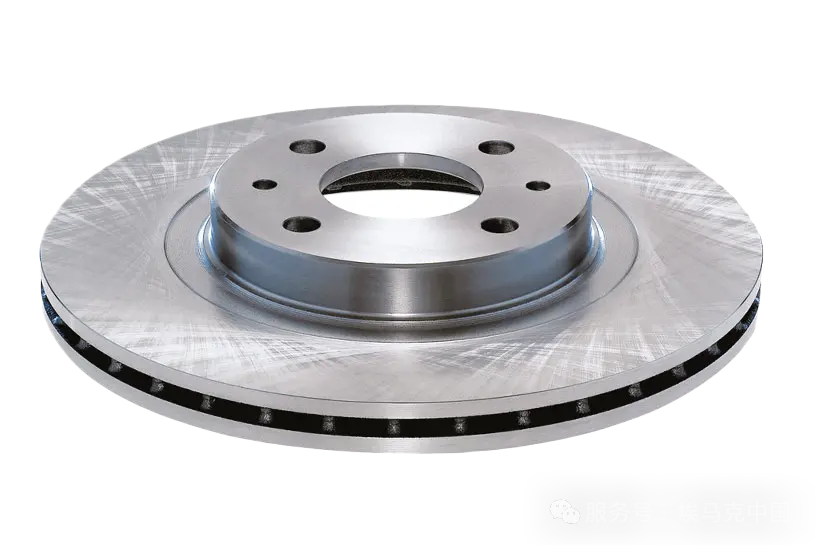
埃马克VLC 450 DG:为涂层制动盘磨削而生的高效
2025-10-30 -

【客户案例】以紧凑型斜切磨床WPG 7,实现高质
2025-09-29 -

强强联合,共谋新篇:埃马克集团与重庆三友集团
2025-09-24
编辑推荐





最新资讯
-
电装亮相2025日本移动出行展,以技术
2025-10-30 12:12
-
9月新品Q&A大放送 | 想知道的都在这
2025-10-30 11:43
-
NimbleTrack-CR | 追求无损扫描下的
2025-10-30 11:37
-
聚焦机床 | 高效成形磨削:埃马克GP
2025-10-30 11:35
-
埃马克VLC 450 DG:为涂层制动盘磨削
2025-10-30 11:33