
焊接机器人工作站有组成结构详解!
2017-06-11 16:02:42·
微信公众号

焊接机器人系统基本组成:1、 弧焊机器人2、焊机+ 送丝机3、焊枪及清枪装置4、保护气体设备5、工作台、工装夹具、变位机6、 安全系统(围栏、光栅、自动门、门 锁等)7、 排烟系统1、ABB弧焊焊接机器人简介 :2、焊机与送丝机:3、焊枪与清枪装置:4、工作台及安全系统:5、保护气体及辅助设备:供气系统管路1-气源 2-预热
焊接机器人系统基本组成:
1、 弧焊机器人
2、焊机+ 送丝机
3、焊枪及清枪装置
4、保护气体设备
5、工作台、工装夹具、变位机
6、 安全系统(围栏、光栅、自动门、门 锁等)
7、 排烟系统
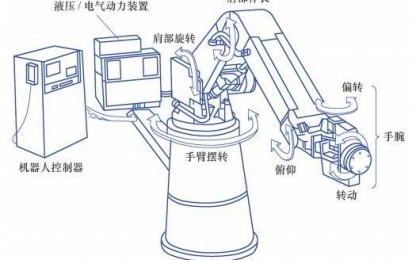
1、ABB弧焊焊接机器人简介 :


2、焊机与送丝机:

3、焊枪与清枪装置:
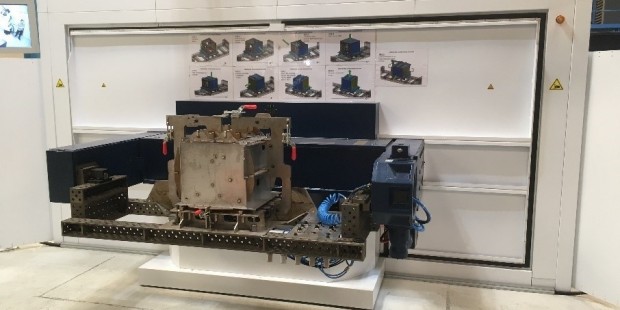
4、工作台及安全系统:

5、保护气体及辅助设备:

供气系统管路
1-气源 2-预热器 3-高压干燥器 4-气体减压阀 5—气体减压阀 6低压干燥器 7—气阀

6、排烟系统:

7、焊接机器人弧焊系统配置:

8、电气连接:

通常选择D651板 (8 DO, 8 DI, 2 AO(0~10V))
AoWeldingCurrent(Ao): 地址 0~15 控制焊接电流或者送丝速度AoWeldingVoltage (Ao): 地址 16~31 控制焊接电源
doWeldOn (数字输出): 地址 32 起弧控制
doGasOn(数字输出): 地址 33 送气控制
doFeed (数字输出): 地址 34 点动送丝控制
diArcEst (数字输入) : 地址 0 起弧建立信号
对于如 Fronius,ESAB, Kemppi ,Miller 等焊接电源,ABB都有相应的标 准接口软件。如果没有相应的接口模块,则选用通用模板进行配置。



编辑推荐





最新资讯
-
深圳电机产业链交流会议程正式公布
2025-10-14 14:31
-
比亚迪叉车:以新能源科技链接传统酿
2025-10-14 10:31
-
金杯品牌日即将启幕 多能源、智能化
2025-10-10 15:56
-
沈阳金杯多款车型亮相“老北市” 助
2025-10-05 17:54
-
金杯全系焕新产品正式下线 推出至高1
2025-10-01 14:10