
浅谈ABB涂胶机器人的功能及应用
2018-06-13 14:56:29· 来源:现代涂料与涂装
微信公众号

随着我国汽车工业的飞速发展,伴随着材料、机械加工、电子、控制、传感器等相关技术的不断进步,机器人已经被广泛地应用于各大汽车生产厂。特别是随着我国城市化进程的不断推进,汽车产量的不断增加,机器人的需求量也急剧增加。在这一背景下,对机器人的研究就显得尤为重要。
浅谈ABB涂胶机器人的功能及应用
闫肃
(中国第一汽车集团股分有限公司,长春 130000)
0 引言
随着我国汽车工业的飞速发展,伴随着材料、机械加工、电子、控制、传感器等相关技术的不断进步,机器人已经被广泛地应用于各大汽车生产厂。特别是随着我国城市化进程的不断推进,汽车产量的不断增加,机器人的需求量也急剧增加。在这一背景下,对机器人的研究就显得尤为重要。
1 喷涂机器人历史已及现阶段状态
自从20世纪50年代第一台工业机器人问世以来,机器人的发展已经半个世纪,从机器人诞生到现在,机器人技术经历了一个长期缓慢的发展过程。纵观半个世纪以来机器人的发展历史,机器人技术在需求的牵引下得到了巨大的发展。随着科学技术的不断进步,机器人学科越来越具有强大的生命力,它代表当今信息技术、自动化技术、系统集成等技术的最新发展。工业机器人被广泛地应用于汽车、电器、摩托车、工程机械等制造业领域,从事焊接、装配、喷漆、搬运、包装、检测等作业。
本文通过轿车公司新建车间项目,通过安装、调试ABB机器人IRB 2600,了解和熟悉机器人的结构原理和工作原理。机器人主要由机器人本体、计算机控制系统组成。
2 底涂机器人喷涂系统
2.1 ABB机器人 IRB2600简介
涂装车间电气化设备自动化程度高,底涂作业采用2台ABB 机器人IRB2600可完成大本分喷涂工作,减轻了人工劳动的强度,改善了工人的工作环境,并在最大程度上保证了生产的有序进行。机器人采用2个7轴(其中一个为附加的行走轴)机器人来完成工作,避免了人在不宜久留的有毒的空间工作,最大程度地保证人身的安全。
IRB 2600机器人包括机械结构系统、控制系统、驱动系统、末端执行器系统。这些系统主要负责控制驱动系统动作、示教再现以及存储信息、I/O等。
自由度是机器人的一个重要的参数,也就是由机器人的底座算起相对独立运动部件的个数。机器人要按照人的要求完成工作,其末端执行器必须达到所需要执行任务的位置,而且要求末端执行器必须有一个合适的能够完成工作的姿态,也就是作业空间的概念。底涂机器人由于作业范围比较大,因此增加了一个行走的附加轴来完成喷涂要求。关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
2.2 照相系统原理
底涂机器人主要是通过ISRA摄像系统进行位置坐标修正,用于摄像定位的矫正。车身定位测量系统CAPMES(Car Body Position Measurement System)是一个用于快速 3D 位置测量的系统。用于确定在3个位置坐标内以及在空间的3个相移角中与规定的理论位置之间的偏差。
测量利用4个CCD 相机进行。系统在由相机所提供的图像中分别识别到需测量的车身上一个或多个预先示教的特征,并由此计算出其位置作为测量结果。特征也就是各类工艺孔或冲孔或边缘的交点。在生产中必须以足够的精确度确保特征在车身坐标中的位置。将测量所得的特征孔在车身坐标系中的准确位置输入到该系统中。由 CAPMES 所测定的位置用于对机器人程序进行位置修正。为此必须将机器人和测量系统的坐标系相互协调。由相机所摄取的图像以数字形式存储在计算机中。
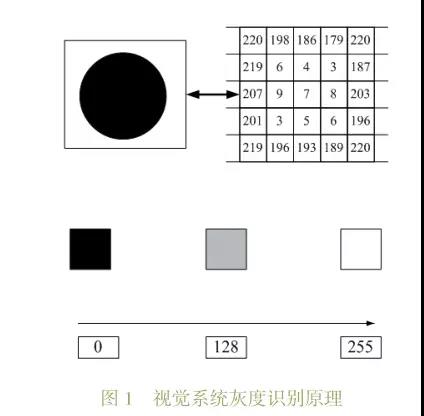
数字图像由一个个图像点(像素)构成。每个像素都被分配了一个灰度值,以表示该图像点的亮度。灰度值可以取0和255之间的值。一个灰度值为0的像素是黑色的。一个灰度值为255的像素是白色的,图像处理利用不同的数学算法,以确定边线或一个孔的位置。
摄像头常分为彩色和黑白两种摄像头,主要工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后通过电压值的高低,判读视频信号的灰度。摄像头连续地扫描图像,就输出一段连续的电压视频信号,该电压信号的高低起伏正反映了该行图像的灰度变化情况。为了有效地获取摄像头的视频信号,我们采用视频采集卡提取行同步脉冲,消除隐性脉冲和场同步脉冲。采集卡内部芯片的A/D转换器,并配合从视频信号分离出的同步信号,该采集卡可以直接将图像信号采集到其内部的RAM中,然后通过软件对图像信息进行处理。视觉系统灰度识别原理如图1所示。
CAPMES 带有全自动校准功能,测量都应在一个规定的参考坐标系内进。CAPMES 具有与机器人控制系统之间的集成式串行接口。由于这些接口部分是并行的,因此即使是有很多机器人时,传输时间也可以很短。其接口有以下几种:数字输入/输出卡(24个输入端和24个输出端)、串行通讯卡(RS232或 RS422/RS485)、ProfiBus-DP 接口卡。在校正时将确定所需的设备几何参数。在安装了 CAPMES 的设备中有以下坐标系:机器人坐标 R、参考坐标 O、车身坐标 K、相机坐标 B、校准盘坐标 T。
机器人坐标和参考坐标也就是喷房坐标之间的关系在调试机器人时建立后不再变化。根据这些坐标,机器人就可以按照ISRA摄像定位系统测量所得的偏移数据进行程序调整,从而达到准确喷涂的目的。并且根据其监控带来的各位置的偏移量,我们可以设定初始值,如果超出该值摄像系统会报警,防止机器人的碰撞,有效地避免了碰撞故障的发生。
2.3 PLC控制系统
底涂机器人喷涂系统包括:ABB机器人、明信公司输胶系统、ISRA摄像系统、西门子PLC控制系统。
可编程序逻辑控制器(Programmable Logic Controller,PLC)广泛地应用于工业控制。它通过用户存储的应用程序来控制生产过程,具有可靠性高、稳定性和实时处理能力强的优点。可编程序控制器是把计算机技术与继电器控制技术有机结合起来,为工业自动化提供的几乎完美的现代化自动控制装置。
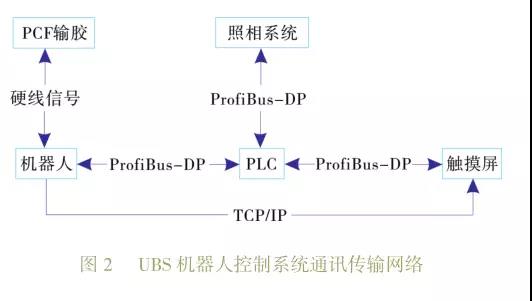
控制系统通过PLC收集和处理现场的各种信号,底涂机器人的控制信号通过PLC喷涂系统的数据通信传输,如图2所示。
2.4 Shop Floor Editor编程软件介绍
Shop Floor Editor 是一款在Shop Floor 上优化流程及编辑程序的高效快速的程序编辑器。尤其是在机器人喷房的安装及操作阶段,操作员需要频繁地优化Rapid 程序。它可让你离线编辑Rapid 程序而不打断生产。Shop Floor Editor 使用熟知的Windows 编辑技术,因此学习及操作都很简单。Editor 包括Rapid 语法检查器、一个Point Editor 和一个图形化程序编辑的三维彩色图形屏幕。
3 机器人调试编程
本章以ABB底涂机器人喷涂系统添加新车型调试为基础,说明调试步骤和如何编写程序。
3.1 ISRA视觉系统添加新车型
首先复制一个现有车型的程序,将名字改为新车型的名字,打开measurement style1,对车体进行拍照,每个相机照一张照片,在照片上选取比较明显的点作为特征点,选定特征点后需在车身底板的三维图纸上找到特征点的空间三维坐标,将坐标值输入到相应位置。
其次是确定该特征孔的搜索范围。右键点击图片,选择100%放大,拉大或者缩小绿色范围来定义搜索区域,范围需大于正负25mm;定义特征孔的位置,通过修改绿色方框的范围,点击teach,来使右侧的十字定位孔的中心,之后点击result,检查结果,直到结果为1。
3.2 人机界面添加新车型
现在系统已经有3种车型,在人机界面上设置新车型的车型名称和程序号,车型名称和程序号通过数组对应。代码栏内的车型数据信息通过数组地址访问的形式发送到PLC,无需更改PLC程序。添加完成后需要使PLC的数据和PC的数据相一致。点击下方按钮确认数据一致。
3.3 机器人系统程序添加车型
增加该轨迹程序的自动调用设置,在home\robodata\Routine_R21.SYS中把新车型的名称填入到程序号索引的第4个位置,增加该车型的工件坐标系,把计算出的数据填入home\robodata\workobj_R21.sys中的坐标系内。修改视觉系统例行子程序的调用索引,在user.sys内的VMT索引表中,把车型代码填入到第4个位置,当程序号为4时自动调用名为新车型的例行程序。
3.4. 机器人运行程序编写
ABB机器人编程语言类似C语言,编程原理是主程序调用子程序,每条语句其实是调用一个形参函数,语句内部有运行方式、开关枪、运行速度、坐标系等实参值。下面是UBS机器人主程序,主程序调用每一块的分段程序,每一个分段程序都是由多条标准语句组成。
PROC UBC ()
GAD_Front_Wheel;
GAD_Bottom;
GAD_Rear_Wheel;
UBS_Rear_Wheel;
UBS_Front_Wheel;
ENDPROC
程序共分为5段子程序,分别对应前轮罩焊缝密封程序、底板焊缝密封程序、后轮罩焊缝密封程序、前轮罩喷胶程序、后轮罩喷胶程序。图3为一个标准语句的参数功能讲解。
.jpg)
对机器人进行编程调试实际上就是一个示教再现的过程。示教也就是通过计算机把人的作业命令发送给机器人,机器人通过内部的编码器感知时间以及位置、姿态、运动参数、工艺参数等信息,然后记录到控制器中。机器人将获得的运行轨迹通过自身算法计算出每个轴的伺服运动,工作时机器人就按照程序进行工作,就是“再现”过程。示教再现的优点是简单方便,在现场直接操作机器人即可完成,同时可以修正机器人机械结构带来的误差,但是其缺点同样明显:因为要占用机器人方能完成示教再现,因此无法在生产中完成调试,这就给调试工作带来一定的困难。
4 底涂机器人的应用
在实际的应用过程中底涂机器人在涂装生产线上取得了巨大的作用。例如,在某主机厂就得到了应用,在建线之初的选型阶段,考虑到车间的产能及生产节拍问题,所以选择了IRB2600型号的机器人。此型号的机器人既可以实现GAD焊缝密封的打胶功能,又可以实现UBS底板防护的喷胶功能,这样的选型即节省了空间,又可以使得机器人实现功能的最大化,节省了人工和成本。
4.1 机器人程序的初建立
首先新车型建立新的喷涂程序之前需要做许多准备工作,例如在人机界面添加新的车型,在照相系统中添加新车型等。这些前期工作在本文之前已经都介绍过,在这里主要介绍一下如何针对某车型如何建立一个独有的喷涂轨迹程序。
由于各个车型所选用的底板不同,所以新车型来了就需要对其底板喷涂轨迹进行示教。利用示教器,对机器人喷涂轨迹上的每一个点进行定义,并且调整机器人的姿态,让机器人可以用最少的时间完成最多的工作。
4.2 机器人轨迹的后期优化
当机器人轨迹最初建立完毕之后,虽然喷涂的位置都已经确定,但是喷涂的膜厚还未必达到要求,焊缝打胶还会有细微的偏差。这是就可以利用外部编辑器对轨迹进行微调,但是如果需要增加程序段仍需要通过示教器来完成。例如,调整喷涂的膜厚可以通过调整喷涂的速度来改变。
5 结语
涂装生产线ABB机器人与PLC控制、总线控制、网络通讯等国际先进技术相结合,使机器人的功能更加强大、操作更加方便,同时将操作工人从有毒、繁重、单调、危险的工作环境中解放出来,极大地提高了工作效率。通过在机器人的实际应用发现机器人的一些问题和不足,也促使我们不断努力学习先进技术,不断寻求更加有效的手段,让机器人为中国的汽车制造业做出更大贡献。
(详情见《现代涂料与涂装》2018-5)
闫肃
(中国第一汽车集团股分有限公司,长春 130000)
0 引言
随着我国汽车工业的飞速发展,伴随着材料、机械加工、电子、控制、传感器等相关技术的不断进步,机器人已经被广泛地应用于各大汽车生产厂。特别是随着我国城市化进程的不断推进,汽车产量的不断增加,机器人的需求量也急剧增加。在这一背景下,对机器人的研究就显得尤为重要。
1 喷涂机器人历史已及现阶段状态
自从20世纪50年代第一台工业机器人问世以来,机器人的发展已经半个世纪,从机器人诞生到现在,机器人技术经历了一个长期缓慢的发展过程。纵观半个世纪以来机器人的发展历史,机器人技术在需求的牵引下得到了巨大的发展。随着科学技术的不断进步,机器人学科越来越具有强大的生命力,它代表当今信息技术、自动化技术、系统集成等技术的最新发展。工业机器人被广泛地应用于汽车、电器、摩托车、工程机械等制造业领域,从事焊接、装配、喷漆、搬运、包装、检测等作业。
本文通过轿车公司新建车间项目,通过安装、调试ABB机器人IRB 2600,了解和熟悉机器人的结构原理和工作原理。机器人主要由机器人本体、计算机控制系统组成。
2 底涂机器人喷涂系统
2.1 ABB机器人 IRB2600简介
涂装车间电气化设备自动化程度高,底涂作业采用2台ABB 机器人IRB2600可完成大本分喷涂工作,减轻了人工劳动的强度,改善了工人的工作环境,并在最大程度上保证了生产的有序进行。机器人采用2个7轴(其中一个为附加的行走轴)机器人来完成工作,避免了人在不宜久留的有毒的空间工作,最大程度地保证人身的安全。
IRB 2600机器人包括机械结构系统、控制系统、驱动系统、末端执行器系统。这些系统主要负责控制驱动系统动作、示教再现以及存储信息、I/O等。
自由度是机器人的一个重要的参数,也就是由机器人的底座算起相对独立运动部件的个数。机器人要按照人的要求完成工作,其末端执行器必须达到所需要执行任务的位置,而且要求末端执行器必须有一个合适的能够完成工作的姿态,也就是作业空间的概念。底涂机器人由于作业范围比较大,因此增加了一个行走的附加轴来完成喷涂要求。关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。
2.2 照相系统原理
底涂机器人主要是通过ISRA摄像系统进行位置坐标修正,用于摄像定位的矫正。车身定位测量系统CAPMES(Car Body Position Measurement System)是一个用于快速 3D 位置测量的系统。用于确定在3个位置坐标内以及在空间的3个相移角中与规定的理论位置之间的偏差。
测量利用4个CCD 相机进行。系统在由相机所提供的图像中分别识别到需测量的车身上一个或多个预先示教的特征,并由此计算出其位置作为测量结果。特征也就是各类工艺孔或冲孔或边缘的交点。在生产中必须以足够的精确度确保特征在车身坐标中的位置。将测量所得的特征孔在车身坐标系中的准确位置输入到该系统中。由 CAPMES 所测定的位置用于对机器人程序进行位置修正。为此必须将机器人和测量系统的坐标系相互协调。由相机所摄取的图像以数字形式存储在计算机中。
数字图像由一个个图像点(像素)构成。每个像素都被分配了一个灰度值,以表示该图像点的亮度。灰度值可以取0和255之间的值。一个灰度值为0的像素是黑色的。一个灰度值为255的像素是白色的,图像处理利用不同的数学算法,以确定边线或一个孔的位置。
摄像头常分为彩色和黑白两种摄像头,主要工作原理是:按一定的分辨率,以隔行扫描的方式采样图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后通过电压值的高低,判读视频信号的灰度。摄像头连续地扫描图像,就输出一段连续的电压视频信号,该电压信号的高低起伏正反映了该行图像的灰度变化情况。为了有效地获取摄像头的视频信号,我们采用视频采集卡提取行同步脉冲,消除隐性脉冲和场同步脉冲。采集卡内部芯片的A/D转换器,并配合从视频信号分离出的同步信号,该采集卡可以直接将图像信号采集到其内部的RAM中,然后通过软件对图像信息进行处理。视觉系统灰度识别原理如图1所示。
CAPMES 带有全自动校准功能,测量都应在一个规定的参考坐标系内进。CAPMES 具有与机器人控制系统之间的集成式串行接口。由于这些接口部分是并行的,因此即使是有很多机器人时,传输时间也可以很短。其接口有以下几种:数字输入/输出卡(24个输入端和24个输出端)、串行通讯卡(RS232或 RS422/RS485)、ProfiBus-DP 接口卡。在校正时将确定所需的设备几何参数。在安装了 CAPMES 的设备中有以下坐标系:机器人坐标 R、参考坐标 O、车身坐标 K、相机坐标 B、校准盘坐标 T。
机器人坐标和参考坐标也就是喷房坐标之间的关系在调试机器人时建立后不再变化。根据这些坐标,机器人就可以按照ISRA摄像定位系统测量所得的偏移数据进行程序调整,从而达到准确喷涂的目的。并且根据其监控带来的各位置的偏移量,我们可以设定初始值,如果超出该值摄像系统会报警,防止机器人的碰撞,有效地避免了碰撞故障的发生。
2.3 PLC控制系统
底涂机器人喷涂系统包括:ABB机器人、明信公司输胶系统、ISRA摄像系统、西门子PLC控制系统。
可编程序逻辑控制器(Programmable Logic Controller,PLC)广泛地应用于工业控制。它通过用户存储的应用程序来控制生产过程,具有可靠性高、稳定性和实时处理能力强的优点。可编程序控制器是把计算机技术与继电器控制技术有机结合起来,为工业自动化提供的几乎完美的现代化自动控制装置。
控制系统通过PLC收集和处理现场的各种信号,底涂机器人的控制信号通过PLC喷涂系统的数据通信传输,如图2所示。
2.4 Shop Floor Editor编程软件介绍
Shop Floor Editor 是一款在Shop Floor 上优化流程及编辑程序的高效快速的程序编辑器。尤其是在机器人喷房的安装及操作阶段,操作员需要频繁地优化Rapid 程序。它可让你离线编辑Rapid 程序而不打断生产。Shop Floor Editor 使用熟知的Windows 编辑技术,因此学习及操作都很简单。Editor 包括Rapid 语法检查器、一个Point Editor 和一个图形化程序编辑的三维彩色图形屏幕。
3 机器人调试编程
本章以ABB底涂机器人喷涂系统添加新车型调试为基础,说明调试步骤和如何编写程序。
3.1 ISRA视觉系统添加新车型
首先复制一个现有车型的程序,将名字改为新车型的名字,打开measurement style1,对车体进行拍照,每个相机照一张照片,在照片上选取比较明显的点作为特征点,选定特征点后需在车身底板的三维图纸上找到特征点的空间三维坐标,将坐标值输入到相应位置。
其次是确定该特征孔的搜索范围。右键点击图片,选择100%放大,拉大或者缩小绿色范围来定义搜索区域,范围需大于正负25mm;定义特征孔的位置,通过修改绿色方框的范围,点击teach,来使右侧的十字定位孔的中心,之后点击result,检查结果,直到结果为1。
3.2 人机界面添加新车型
现在系统已经有3种车型,在人机界面上设置新车型的车型名称和程序号,车型名称和程序号通过数组对应。代码栏内的车型数据信息通过数组地址访问的形式发送到PLC,无需更改PLC程序。添加完成后需要使PLC的数据和PC的数据相一致。点击下方按钮确认数据一致。
3.3 机器人系统程序添加车型
增加该轨迹程序的自动调用设置,在home\robodata\Routine_R21.SYS中把新车型的名称填入到程序号索引的第4个位置,增加该车型的工件坐标系,把计算出的数据填入home\robodata\workobj_R21.sys中的坐标系内。修改视觉系统例行子程序的调用索引,在user.sys内的VMT索引表中,把车型代码填入到第4个位置,当程序号为4时自动调用名为新车型的例行程序。
3.4. 机器人运行程序编写
ABB机器人编程语言类似C语言,编程原理是主程序调用子程序,每条语句其实是调用一个形参函数,语句内部有运行方式、开关枪、运行速度、坐标系等实参值。下面是UBS机器人主程序,主程序调用每一块的分段程序,每一个分段程序都是由多条标准语句组成。
PROC UBC ()
GAD_Front_Wheel;
GAD_Bottom;
GAD_Rear_Wheel;
UBS_Rear_Wheel;
UBS_Front_Wheel;
ENDPROC
程序共分为5段子程序,分别对应前轮罩焊缝密封程序、底板焊缝密封程序、后轮罩焊缝密封程序、前轮罩喷胶程序、后轮罩喷胶程序。图3为一个标准语句的参数功能讲解。
对机器人进行编程调试实际上就是一个示教再现的过程。示教也就是通过计算机把人的作业命令发送给机器人,机器人通过内部的编码器感知时间以及位置、姿态、运动参数、工艺参数等信息,然后记录到控制器中。机器人将获得的运行轨迹通过自身算法计算出每个轴的伺服运动,工作时机器人就按照程序进行工作,就是“再现”过程。示教再现的优点是简单方便,在现场直接操作机器人即可完成,同时可以修正机器人机械结构带来的误差,但是其缺点同样明显:因为要占用机器人方能完成示教再现,因此无法在生产中完成调试,这就给调试工作带来一定的困难。
4 底涂机器人的应用
在实际的应用过程中底涂机器人在涂装生产线上取得了巨大的作用。例如,在某主机厂就得到了应用,在建线之初的选型阶段,考虑到车间的产能及生产节拍问题,所以选择了IRB2600型号的机器人。此型号的机器人既可以实现GAD焊缝密封的打胶功能,又可以实现UBS底板防护的喷胶功能,这样的选型即节省了空间,又可以使得机器人实现功能的最大化,节省了人工和成本。
4.1 机器人程序的初建立
首先新车型建立新的喷涂程序之前需要做许多准备工作,例如在人机界面添加新的车型,在照相系统中添加新车型等。这些前期工作在本文之前已经都介绍过,在这里主要介绍一下如何针对某车型如何建立一个独有的喷涂轨迹程序。
由于各个车型所选用的底板不同,所以新车型来了就需要对其底板喷涂轨迹进行示教。利用示教器,对机器人喷涂轨迹上的每一个点进行定义,并且调整机器人的姿态,让机器人可以用最少的时间完成最多的工作。
4.2 机器人轨迹的后期优化
当机器人轨迹最初建立完毕之后,虽然喷涂的位置都已经确定,但是喷涂的膜厚还未必达到要求,焊缝打胶还会有细微的偏差。这是就可以利用外部编辑器对轨迹进行微调,但是如果需要增加程序段仍需要通过示教器来完成。例如,调整喷涂的膜厚可以通过调整喷涂的速度来改变。
5 结语
涂装生产线ABB机器人与PLC控制、总线控制、网络通讯等国际先进技术相结合,使机器人的功能更加强大、操作更加方便,同时将操作工人从有毒、繁重、单调、危险的工作环境中解放出来,极大地提高了工作效率。通过在机器人的实际应用发现机器人的一些问题和不足,也促使我们不断努力学习先进技术,不断寻求更加有效的手段,让机器人为中国的汽车制造业做出更大贡献。
(详情见《现代涂料与涂装》2018-5)



编辑推荐





最新资讯
-
一汽车项目落户福建,总投资30亿!
2025-11-03 21:03
-
第七届数字电源关键元器件应用峰会正
2025-11-03 17:12
-
用户思维驱动高速增长,北汽新能源月
2025-11-03 16:23
-
电装亮相2025日本移动出行展,以技术
2025-10-30 12:12
-
9月新品Q&A大放送 | 想知道的都在这
2025-10-30 11:43